
어떤 알고리즘을 사용해야 하는가.
- 데이터의 크기, 품질, 특성
- 가용 연산(계산) 시간
- 작업의 긴급성
- 데이터를 이용해 하고 싶은 것
알고리즘 유형
1. 지도 학습(Supervised learning)
지도 학습 알고리즘은 한 세트의 사례들을(examples) 기반으로 예측을 수행합니다. 예를 들어, 과거 매출 이력(historical sales)을 이용해 미래 가격을 추산할 수 있습니다. 지도 학습에는 기존에 이미 분류된 학습용 데이터(labeled training data)로 구성된 입력 변수와 원하는 출력 변수가 수반되는데요. 알고리즘을 이용해 학습용 데이터를 분석함으로써 입력 변수를 출력 변수와 매핑시키는 함수를 찾을 수 있습니다. 이렇게 추론된 함수는 학습용 데이터로부터 일반화(generalizing)를 통해 알려지지 않은 새로운 사례들을 매핑하고, 눈에 보이지 않는 상황(unseen situations) 속에서 결과를 예측합니다.
-
- 분류(Classification): 데이터가 범주형(categorical) 변수를 예측하기 위해 사용될 때 지도 학습을 ‘분류’라고 부르기도 합니다. 이미지에 강아지나 고양이와 같은 레이블 또는 지표(indicator)를 할당하는 경우가 해당되는데요. 레이블이 두 개인 경우를 ‘이진 분류(binary classification)’라고 부르며, 범주가 두 개 이상인 경우는 다중 클래스 분류(multi-class classification)라고 부릅니다.
- 회귀(Regression): 연속 값을 예측할 때 문제는 회귀 문제가 됩니다.
- 예측(Forecasting): 과거 및 현재 데이터를 기반으로 미래를 예측하는 과정입니다. 예측은 동향(trends)을 분석하기 위해 가장 많이 사용되는데요. 예를 들어 올해와 전년도 매출을 기반으로 내년도 매출을 추산하는 과정입니다.
2. 준지도 학습(Semi-supervised learning)
지도 학습은 데이터 분류(레이블링) 작업에 많은 비용과 시간이 소요될 수 있다는 단점을 지닙니다. 따라서 분류된 자료가 한정적일 때에는 지도 학습을 개선하기 위해 미분류(unlabeled) 사례를 이용할 수 있는데요. 이때 기계(machine)는 온전히 지도 받지 않기 때문에 “기계가 준지도(semi-supervised)를 받는다”라고 표현합니다. 준지도 학습은 학습 정확성을 개선하기 위해 미분류 사례와 함께 소량의 분류(labeled) 데이터를 이용합니다.
3. 비지도(자율) 학습(Unsupervised learning)
비지도 학습을 수행할 때 기계는 미분류 데이터만을 제공 받습니다. 그리고 기계는 클러스터링 구조(clustering structure), 저차원 다양체(low-dimensional manifold), 희소 트리 및 그래프(a sparse tree and graph) 등과 같은 데이터의 기저를 이루는 고유 패턴을 발견하도록 설정됩니다.
-
- 클러스터링(Clustering): 특정 기준에 따라 유사한 데이터 사례들을 하나의 세트로 그룹화합니다. 이 과정은 종종 전체 데이터 세트를 여러 그룹으로 분류하기 위해 사용되는데요. 사용자는 고유한 패턴을 찾기 위해 개별 그룹 차원에서 분석을 수행할 수 있습니다.
- 차원 축소(Dimension Reduction): 고려 중인 변수의 개수를 줄이는 작업입니다. 많은 애플리케이션에서 원시 데이터(raw data)는 아주 높은 차원의 특징을 지니는데요. 이때 일부 특징들은 중복되거나 작업과 아무 관련이 없습니다. 따라서 차원수(dimensionality)를 줄이면 잠재된 진정한 관계를 도출하기 용이해집니다.
4. 강화 학습(Reinforcement learning)
강화 학습은 환경으로부터의 피드백을 기반으로 행위자(agent)의 행동을 분석하고 최적화합니다. 기계는 어떤 액션을 취해야 할지 듣기 보다는 최고의 보상을 산출하는 액션을 발견하기 위해 서로 다른 시나리오를 시도합니다. 시행 착오(Trial-and-error)와 지연 보상(delayed reward)은 다른 기법과 구별되는 강화 학습만의 특징입니다.
학습하는 시스템을 에이전트라고 하고, 환경을 관찰해서 에이전트가 스스로 행동하게 합니다. 모델은 그 결과로 특정 보상을 받아 이 보상을 최대화하도록 학습합니다. 강화학습에서 기본적으로 쓰이는 용어를 정리하면 다음과 같습니다.
- 에이전트(Agent): 학습 주체 (혹은 actor, controller)
- 환경(Environment): 에이전트에게 주어진 환경, 상황, 조건
- 행동(Action): 환경으로부터 주어진 정보를 바탕으로 에이전트가 판단한 행동
- 보상(Reward): 행동에 대한 보상을 머신러닝 엔지니어가 설계
다음은 강화학습 알고리즘의 대표적인 종류입니다.
- Monte Carlo methods
- Q-Learning
- Policy Gradient methods
선택 시 주의사항
선택에 가장 최우선 해야할 것은 정확성 / 학습시간 / 사용편의성.
초급자처럼 가장 익숙한 알고리즘, 가장 결과가 빨리나오는 길을 고르지 말것.
데이터셋이 제공되면, 어떤 결과가 나올 것인지가 아닌(What), 어떻게 결과를 얻을 것인지 (How)를 생각하기.
모델 돌리기 전에 시뮬레이션 해볼 수 있는 곳
Tensorflow — Neural Network Playground
Tinker with a real neural network right here in your browser.
playground.tensorflow.org
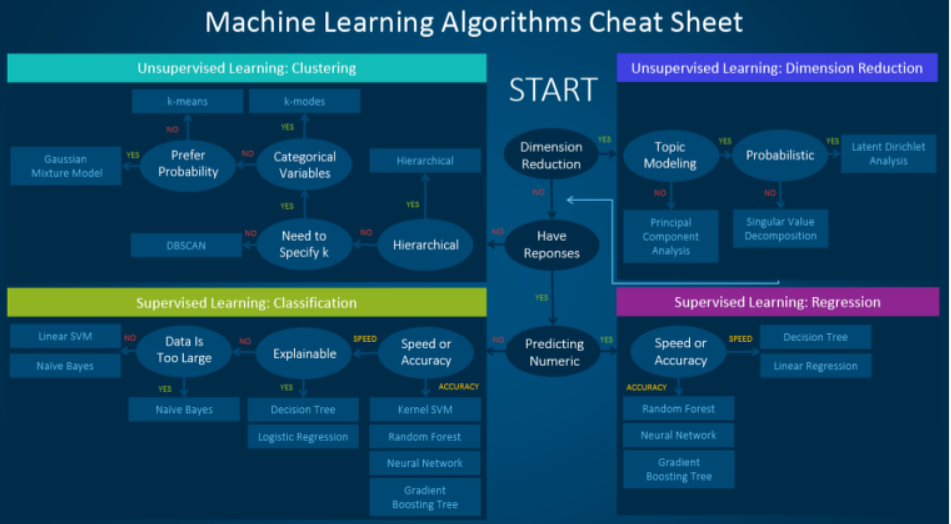
최적의 ‘머신러닝 알고리즘’을 고르기 위한 치트키
“어떤 알고리즘을 사용해야 할까요?
blogs.sas.com
'Study (Data Science) > ML' 카테고리의 다른 글
| Matplotlib, Seaborn (0) | 2022.12.07 |
|---|---|
| Scikit-Learn (0) | 2022.12.07 |
| 오차행렬, FP, FN, F-score, Threshold (0) | 2022.12.07 |
| Batch size, Epoch, Iteration (0) | 2022.12.06 |
| 여러가지 머신러닝 모델들 (0) | 2022.12.06 |




댓글